
Hoy en día nadie busca comprar un coche por las funciones más básicas como como el ABS o el BAS, ya que todos los vehículos lo tienen de serie. Estas funciones están gestionadas por el protocolo CAN desde 1992.
CAN fue diseñado por Bosch en 1980, aunque no es hasta 1987 cuando comienzan a verse los famosos microordenadores (o ECU) que poseen los coches desarrollados para ser utilizados por el protocolo. Finalmente, 1991 aparece la primera normalización de CAN de baja velocidad (hasta 125kbps).
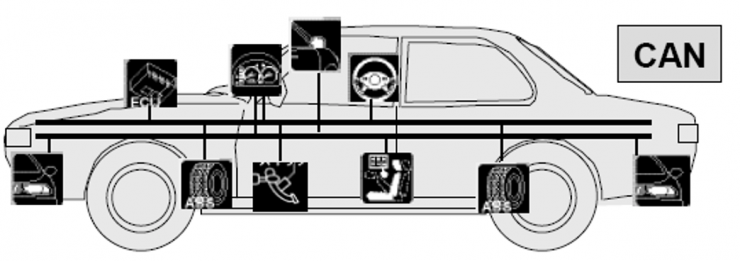
(Florent.david.lille1 – Own work, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=30533927)
El protocolo CAN funciona mediante un bus de datos, en el cual todos los dispositivos emiten sus comunicaciones al tiempo que los equipos interesados recogen esta información para interactuar. De esta manera los coches pasaron a ahorrarse kilómetros de cableado.
[Read more…]